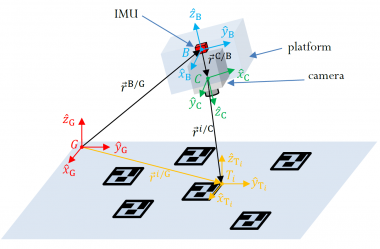
This week, I formule an aerospace/robotic application for the continuous-discrete filters. It consists of the navigation of a 6DOF platform equipped with inertial sensors (accelerometers and rate-gyros) as well as a camera. The scenario contains many fiducial markers placed at known positions. The visual fiducial system is assumed to be available; it provides indirect measures of the visible markers’ relative position w.r.t. the camera. In this application, we have to estimate the platform position, velocity, attitude, as well as the accelerometer and rate-gyro biases. Material: Continue→
This week, we present the discrete and continuous-discrete formulations of the uncented Kalman filter. Material: Chapter 7 – Part I: Discrete Unscented Kalman Filter Chapter 7 – Part II: Continuous-Discrete Unscented Kalman Filter Computational Exercise #3: CDUKF and CDEKF Previous post of this course: Week 1: Syllabus + Introduction Week 2: Linear Algebra + Linear Systems Week 3: Set + Probability + Random Variables Week 4: Random Variables + Random Vectors Week 5: Random Vectors + Stochastic Processes Week 6: Stochastic Processes + Parameter Estimation Continue→
This week, I present the discrete and continuous-discrete formulations of the extended Kalman filter. This is an approximation of the KF for non-linear systems. Material: Chapter 6 – Part I: Discrete Extended Kalman Filter Chapter 6 – Part II: Continuous-Discrete Extended Kalman Filter Previous post of this course: Week 1: Syllabus + Introduction Week 2: Linear Algebra + Linear Systems Week 3: Set + Probability + Random Variables Week 4: Random Variables + Random Vectors Week 5: Random Vectors + Stochastic Processes Week 6: Stochastic Continue→
This week, I finally start talking about the Kalman filter! In particular, in Chapter 4, I present the classic filter formulations (discrete-time and continuous-time), while, in Chapter 5, I address some computational issues and show some tools to overcome them. Material: Chapter 4: Kalman Filter Chapter 5: Computational Aspects of the Kalman Filter Computational Exercise #2 Previous post of this course: Week 1: Syllabus + Introduction Week 2: Linear Algebra + Linear Systems Week 3: Set + Probability + Random Variables Week 4: Random Variables Continue→
This week, I finish Chapter 3 (about parameter estimation) initiated in Week 6 and start presenting Chapter 4 (about state estimation). Regarding Chapter 3, I particularly present the two remaining estimation criterion: maximum a posteriori probability (MAP) and minimum mean square error (MMSE). On the other hand, regarding Chapter 4, I define the linear-Gaussian state estimation problem and start to present its exact solution (which is the well-known Kalman filter!). Material: Chapter 3: Parameter Estimation Chapter 4: Kalman Filter Previous post of this course: Week Continue→
This week, I finish Section 2.7 (about stochastic processes) initiated in Week 5 and fully present Chapter 3, which is about parameter estimation. This chapter is very important, since the notation and estimation criteria adopted here (particularly the Bayesian ones) will be almost directly applied to the formulation of optimal filters from Chapter 4 on. Material: Section 2.7: Stochastic Processes Chapter 3: Parameter Estimation Computational Exercise #1 Previous post of this course: Week 1: Syllabus + Introduction Week 2: Linear Algebra + Linear Systems Week Continue→
This week, I finish Section 2.6 (about random vectors) initiated in Week 4. Moreover I present the last section of Chapter 2, which is about stochastic processes. Material: Section 2.7: Stochastic Processes Previous post of this course: Week 1: Syllabus + Introduction Week 2: Linear Algebra + Linear Systems Week 3: Set + Probability + Random Variables Week 4: Random Variables + Random Vectors
This week, I finish Section 2.5 (about random variables) initiated in Week 3 and present Section 2.6 (about random vectors). In class, I prove the main properties of the cdf and pdf, define the expected value of a random variable, and develop a lot of examples. Material: Section 2.6: Random Vectors Previous post of this course: Week 1: Syllabus + Introduction Week 2: Linear Algebra + Linear Systems Week 3: Set + Probability + Random Variables
This week, we continue with the background review. In particular, we remind the basic concepts and results of Set Theory, Probability Theory, and Random Variables. I am also publishing a list of exercises related to Chapter 2. Material: Section 2.3: Set Theory Section 2.4: Probability Theory Section 2.5: Random Variables Exercises Previous posts of this course: Week 1: Introduction Week 2: Linear Algebra + Linear Systems
This week, we are going to review some topics on linear algebra and matrices as well as on linear systems. The results summarized here are just the necessary fundamentals for understanding future formulations in this course. Material: Section 2.1: Linear Algebra and Matrices Section 2.2: Linear Systems Previous post of this course: Week 1: Introduction